After some time spent at designing of the final robot I decided to radically flip the whole construction. There were multiple reasons to do that: I wanted to make the machine suitable for extreme environment, light and easy to move from one place t another. By flipping the construction I got rid of the additional three legs. Except of that I decided to use fresnel lens for solidifying the sand, so I needed the construction to cast minimum shadow.

Digital model of delta robot with its maximal work space
 |

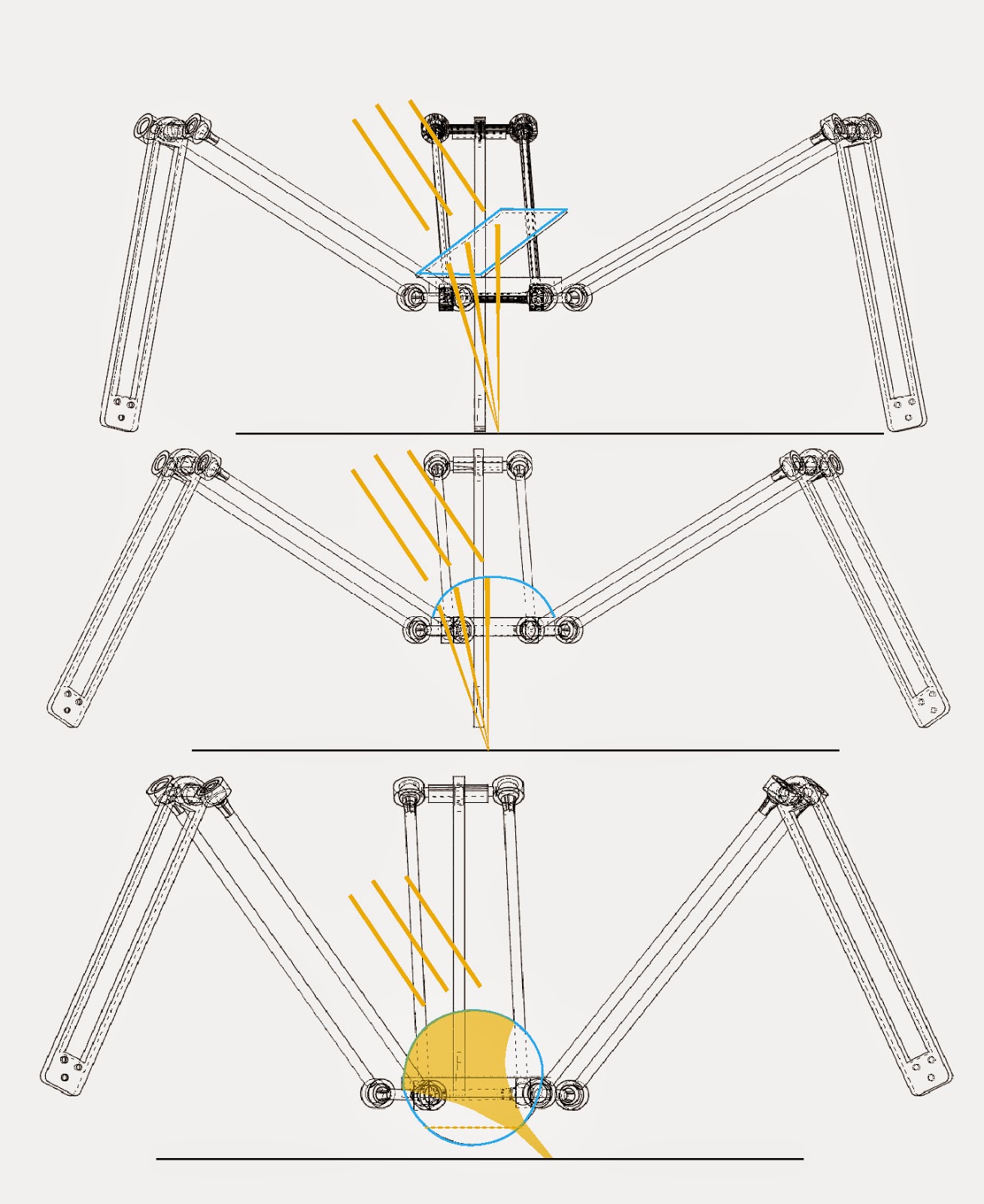
Different types of optic lens- fresnel, hemi-spherical and spherical.
Model of robot as it would look like in scale 1:1

Visualization of robot at work


Žiadne komentáre:
Zverejnenie komentára